




// loading…
Accreditations





Case Study · US-based Self-Drive Vehicle OEM
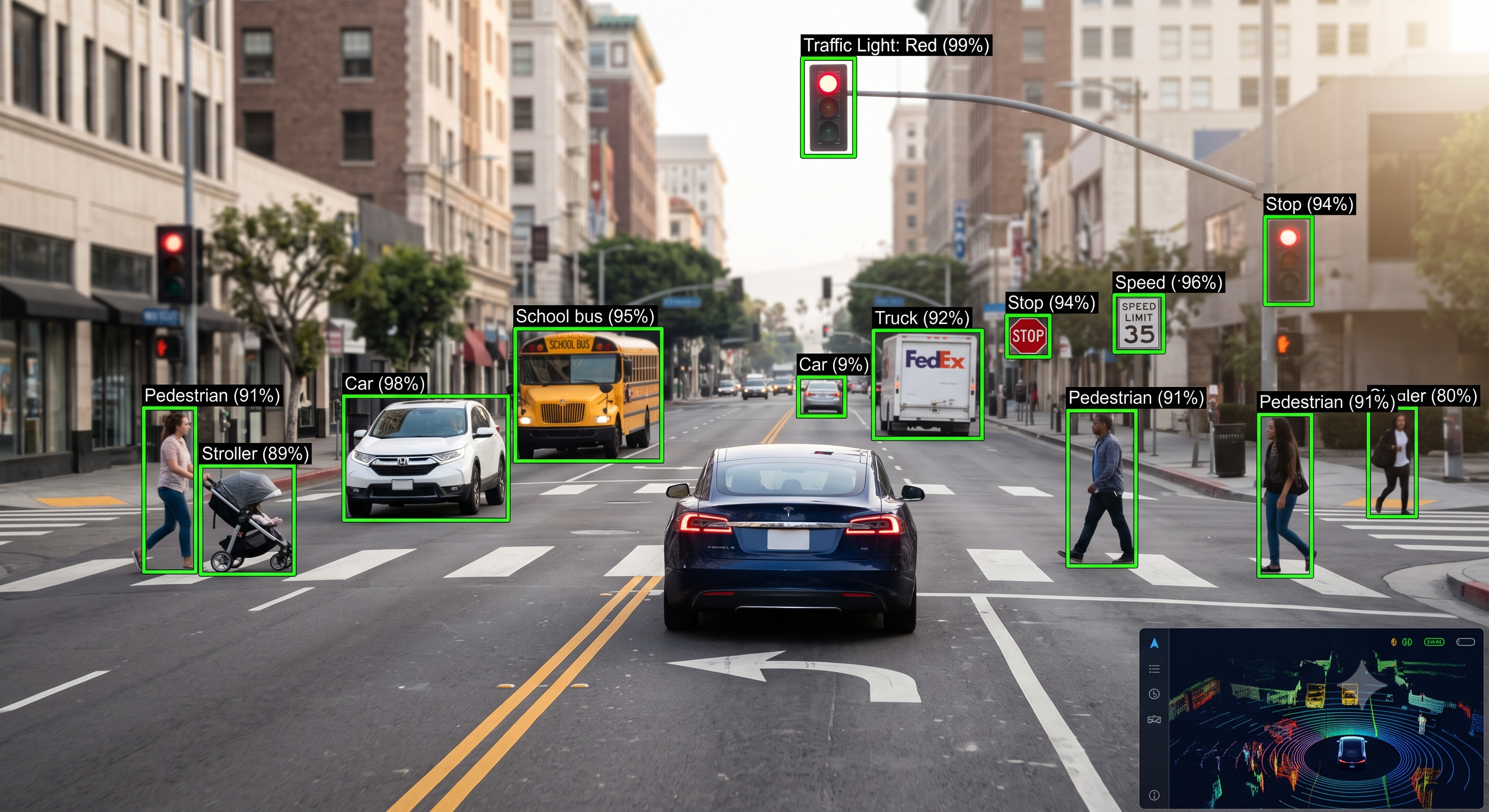
Deep-learning models trained to detect and classify vehicles, pedestrians, strollers, traffic lights, and traffic signs in real time for a US-based self-drive vehicle programme.
Industry
Manufacturing
Region
US
Year
2021
Business requirements & challenges
Identify objects on the road in real time and feed them into the vehicle's control system. The algorithm needed to work on real-world conditions and required hundreds of thousands of training iterations to achieve production accuracy.
Solution
Used YOLO v2 architecture with Darknet-19 and a custom Network-in-Network architecture for object detection and classification. As the name suggests, YOLO scans each frame only once — making it fast enough for real-time use. A lane-detection algorithm was integrated alongside.
Business benefits
The output feeds the self-driving vehicle's decision system, enabling appropriate action based on detected objects. This is a key algorithm in the autonomous-driving stack.
Related
